Terrestrial laser scanning for forest carbon cycle estimation
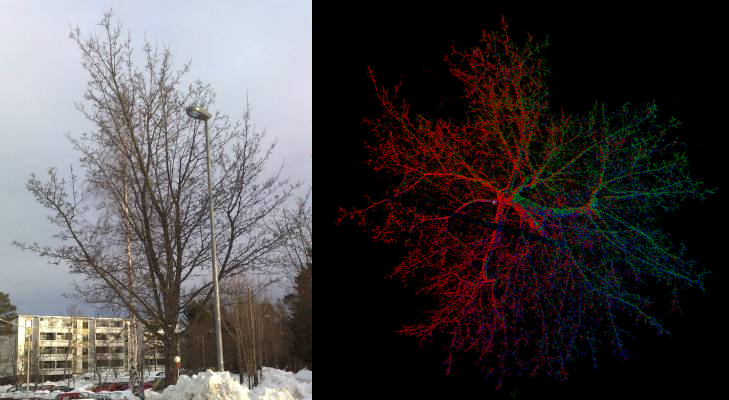
Selected tree (photo on left) was scanned from three different directions and point clouds were combined for biomass analysis (top view of the point cloud on right, individual scans are shown in different colours).
Check out the tree model (by TUT) in 3D! http://math.tut.fi/inversegroup/models.php

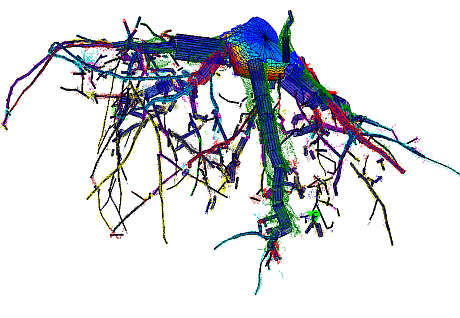
Jan 2013: structure models from tree stumps and roots with TLS and cylinder-based modeling. Point cloud of a tree stump and the cylinder model, image by Pasi Raumonen, TUT.
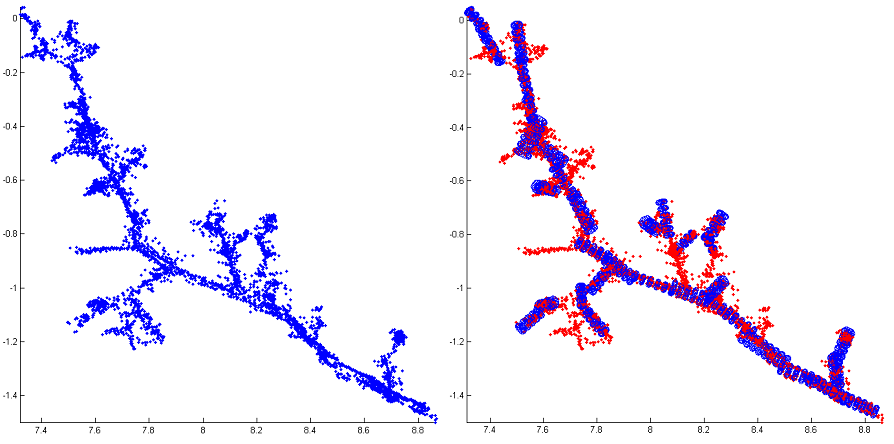
Cylinder fitting for accurate branch size distribution from a TLS point cloud of the tree. Image by Pasi Raumonen, TUT.

Terrestial laser scanning of logging waste.
The research is carried out in co-operation with an interdisciplinary network of experts in mathematical, biological and environmental modelling (Tampere University of Technology, Finnish Environmental Institute (SYKE), Finnish Meteorological Institute). The newest results were presented in last year's EGU (European Geosciences Union) General Assembly, Vienna, click here for the abstract. The research was presented in Laser Scanning 2011, Calgary, see Raumonen et al., Approximation of volume and branch size distribution of trees from laser scanner data. See also http://www.metsatieteellinenseura.fi/files/sms/metsatieteenpaiva2011/mp12_raumonen_ym.pdf (presentation at the workshop of The Finnish Society of Forest Science, in Finnish).
Snow monitoring
The use of terrestrial laser scanning for snow change monitoring is studied especially as part of SNORTEX (Snow Reflectance Transition Experiment) campaings. Both snow cover change detection and the usability of laser point intensity information are under study. The use of laser intensity requires radiometric calibration: for this, calibrated reference targets and a modified NIR digital camera have been used.
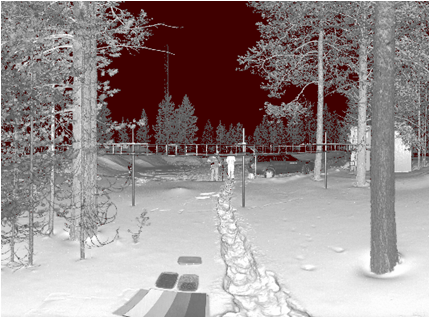
Above an intensity image of a TLS point cloud, intensity calibration grey scale can be seen at the lower part of the image (also gravel was tested on some locations, two small boxes above the grey scale). Below the modified camera and calibration frame for intensity measurements.

Mobile snow mapping was tested by setting the FGI ROAMER mobile mapping system on a sledge. ROAMER consists of a terrestrial laser scanner and GPS/IMU positioning system mounted on a common platform. Mapping can be done either in stop-and-go -mode, where a 360 degree scan is done while the system stays still, or in profile-mode, where the scanner measures profiles while the system is moving.
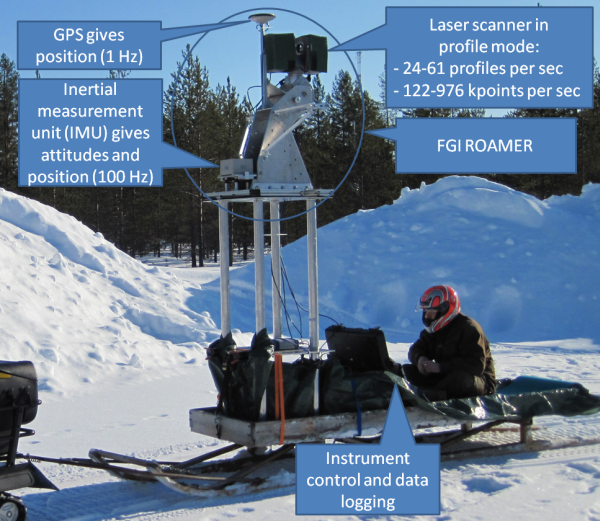
ROAMER together with the control and logging computers installed on a snowmobile sledge.

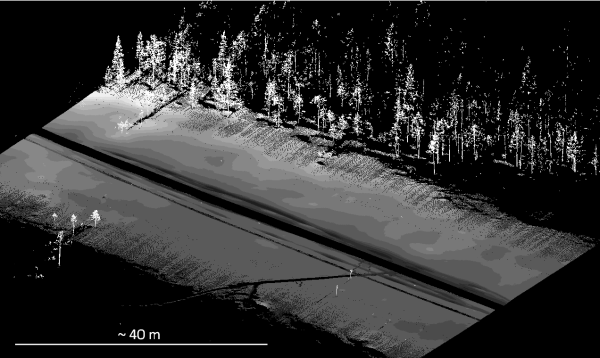
ROAMER collecting data while moving (above) and an example of the final point cloud (below).
More information about snow cover profiling using mobile laser scanning can be found here.
Defoliation & intensity
Defoliation was simulated in the laboratory by cutting of needles/branches from a group of trees, and the trees were scanned between the cuts from different heights using a terrestrial laser scanner.

Faro TLS in a scissor lift, small image: badly 'defoliated' spruces.
The field tests were carried out in Palokangas and Outokumpu, Finland, where conifer sawfly (Diprion pini) causes extensive damages for pine forest by eating all needles.

Intensity calibration was carried out using natural targets, such as gravel roads, and commercial sand & gravel targets.
