The positioning accuracy of satellite positioning using a single receiver typically ranges from several metres to tens of metres. By using positioning services, positioning accuracy can be improved up to centimetres, depending on the type of service. The positioning services make use of the observation data provided by the continuously operating Global Navigation Satellite System (GNSS) base stations.
The FINPOS positioning service of the National Land Survey of Finland (NLS) uses the FinnRef and FINPOS reference stations of the NLS, as well as a few stations of neighbouring countries and partners. The service provides data streams and files, either correction data produced based on the reference stations’ observation data or raw observation data from the stations.
The National Land Survey of Finland has used the FINPOS positioning service in its own production since 2021.
Service descriptions
The FINPOS positioning service consists of real-time services and a service for downloading station data for post-processing etc purposes. FINPOS services listed below:
- The DGNSS (Differential GNSS) service can be used in real time and is intended for users requiring an accuracy of about half a metre. Read more about the DGNSS service and how it works below on this page
- The FinnRef and FINPOS reference station observation data from the RINEX download service can be used for post-processing and achieve up to millimetre accuracy. Read more about RINEX service
- The RTK (Real Time Kinematic) service utilises the carrier phase of GNSS signals and enables up to centimetre accuracy in real time. The RTK service comprises the RTK and SSR methods. Read more about the RTK service and how it works below on this page
- Unedited observation data from base stations is sent from the raw data service in real time streams. Read more about the raw data service
Register as a user
You can access FINPOS services by registering as a user. More information about each service is available below and on the service-specific pages.
- Open and free services include DGNSS and RINEX services
- Temporary access to RTK services may be granted for research & development purposes.
- Raw data service is subject to a charge
Operating principle of the positioning service
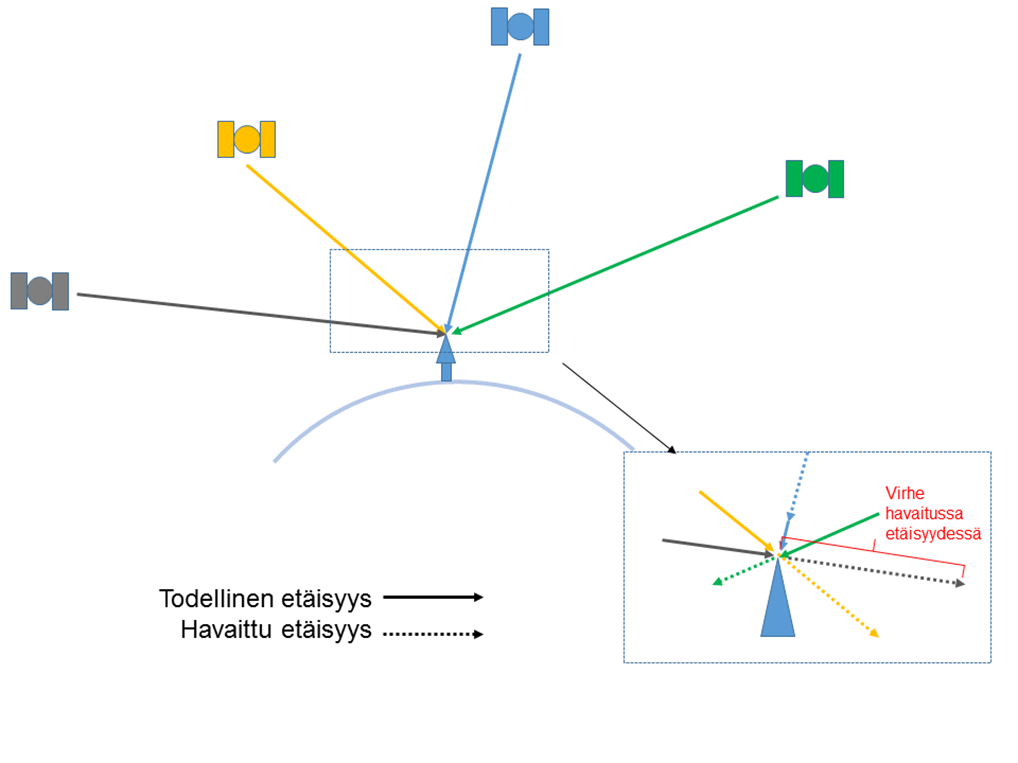
Satellite positioning is based on the determination of the distances between the positioning satellites and the user's receiver. When a distance is defined for several satellites, the user's position can be calculated using the known satellite positions.
However, the determination and reliability of the distance between the satellite and the user's receiver are affected by several sources of error. For example, the effects of the ionosphere and the troposphere, as well as the orbit and clock errors of the satellites, cause errors in the positioning signals. The influence of error sources on the position of the user's receiver can be reduced by making use of the observations of a reference station known precise coordinates. However, this is limited by the distance from the observation station; the further away the user is from the station, the less reliable the information received from the observation station is at the user's location. When multiple GNSS reference stations (e.g. the FinnRef network) are used, the magnitudes of the errors affecting the observations can be modelled between the stations using a positioning service software. Based on these models, corrections or observations are created at the user's location, which are sent over the internet or radio connection to the user's receiver. After that, the receiver utilises the data received from the positioning service to solve its own position and achieves better results than without the use of a positioning service.
See below for a video of how a positioning service works in general terms.
Methods for real-time positioning
DGNSS
DGNSS method (Differential GNSS) is based on the precisely known positions of reference stations. The positions are used to determine the deviation of the observed distances to the GNSS satellites from the expected (known position of the receiver - known position of the satellite). These deviations are called differential/DGNSS corrections which are forwarded to the user. The user’s receiver first corrects its own observed distances by these differential corrections and then calculates its position normally. For positioning, the DGNSS uses codes modulated to GNSS signals to determine the distances to satellites. These code distances do not provide the same accuracy as the carrier wave used for RTK positioning.
RTK
The carrier phase observations made in RTK positioning (Real Time Kinematic) at a reference station with precisely known coordinates are sent in real time to the user's receiver which determines its own position relative to the reference station using its own and the base station's observations. Network RTK positioning, on the other hand, means that, instead of single station observations, virtual observations or models generated to the user's location are sent to the user. These virtual observations are artificial observations which are generated based on error modelling of observations made at the network of reference stations. There are different network RTK methods, such as VRS, PRS, FKP, MAC and MAX. They differ in the way processed data is sent to the user.
In network RTK positioning, the user's device must send its approximate position to the service, which individualizes the corrections to the user's location.
SSR
In the SSR (State Space Representation) method, corrections are sent to the user's device separately for each error source affecting positioning, while in the network RTK method the error sources are summed into modelled observations (OSR (Observation Space Representation)). The user's device then utilises the received correction parameters as desired and produces a so-called PPP solution (Precise Point Positioning) where the location is not resolved in relation to the base station as in RTK. The SSR/PPP method can utilise the carrier wave phase. SSR data includes, for example, corrections to satellite clock and orbit errors, satellite biases, and errors caused by the ionosphere and troposphere. The method is also known as PPP-RTK; the difference between PPP corrections is made by the regional ionospheric and tropospheric models contained in the SSR data.
SSR corrections are not individualized to a single user's location, but all users in the region get the same correction parameters. Regional variation in SSR correction parameters exists only for ionospheric and tropospheric corrections where it is also possible to send the same parameters to different sized areas, e.g. very locally or globally. The EU's Galileo HAS service (High Accuracy Service) will provide free PPP-RTK corrections in Europe. HAS Service Level 1 (provides global clock, orbit and bias corrections) has been declared operational in January 2023, see more information EUSPA.
For more information on SSR/PPP-RTK, see, for example EUSPA, Geo++, GPS World, Institute of Navigation, Septentrio, ublox.