Satelliittipaikannuksen sijaintitarkkuus yhtä vastaanotinta käyttäen on tyypillisesti useista metreistä kymmeniin metreihin. Paikannuspalveluita käyttämällä sijaintitarkkuutta voi parantaa palvelutyypistä riippuen jopa senttimetrien tasolle. Paikannuspalvelut hyödyntävät havaintodataa, jota saadaan kiinteiltä GNSS-tukiasemilta (Global Navigation Satellite System).
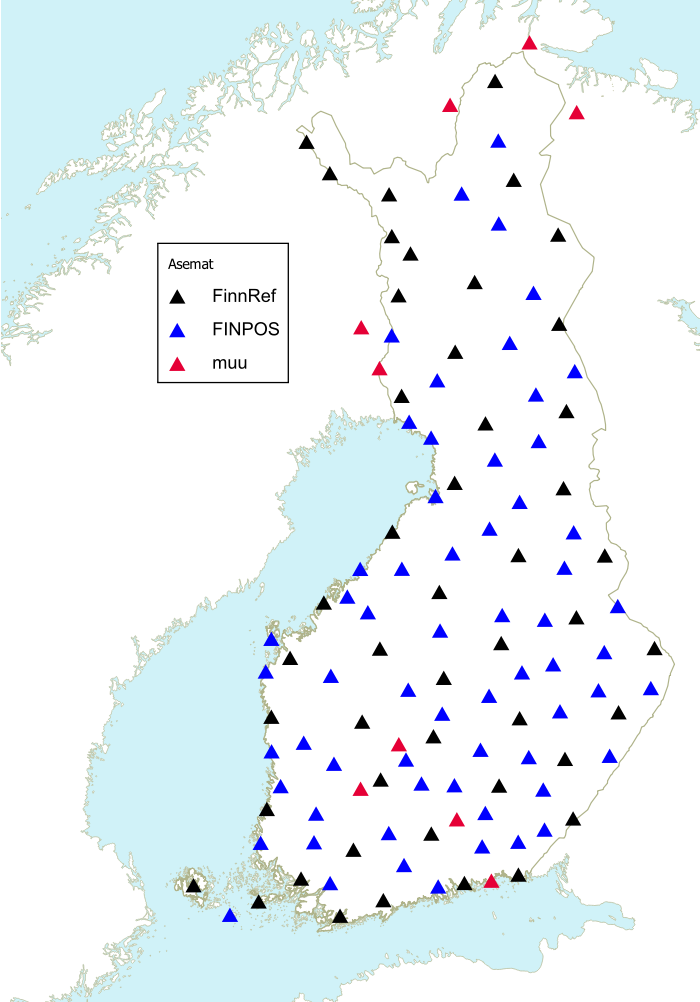
Maanmittauslaitoksen FINPOS-paikannuspalvelu käyttää Maanmittauslaitoksen FinnRef ja FINPOS-tukiasemia, sekä muutamia naapurimaiden ja yhteistyökumppaneiden asemia. Palvelusta jaetaan datastriimeinä ja tiedostoina joko asemien havaintodataan perustuvan virhemallinnuksen tuottamaa korjausdataa, tai asemien muokkaamatonta havaintodataa.
Maanmittauslaitos on käyttänyt FINPOS-paikannuspalvelua omassa tuotannossaan vuodesta 2021 alkaen.
Palveluiden kuvaukset
FINPOS-paikannuspalvelu koostuu reaaliaikaisesti käytettävistä paikannusta tarkentavista palveluista ja jälkilaskentaa varten tarjottavasta paikannusasemadatasta. FINPOS-palvelut lueteltuna:
- DGNSS-palvelua (Differential GNSS) voi käyttää reaaliajassa ja se on tarkoitettu noin puolen metrin tarkkuutta tarvitseville käyttäjille. Lue lisää DGNSS-palvelusta ja sen toimintaperiaatteesta alempaa tältä sivulta
- RINEX-latauspalvelusta saatavaa FinnRef ja FINPOS -tukiasemien havaintodataa voidaan käyttää jälkilaskennassa ja saavuttaa jopa millimetritarkkuus. Lue lisää RINEX-palveluista
- RTK-palvelu (Real Time Kinematic) hyödyntää kantoaallon vaihetta ja se mahdollistaa jopa senttimetritarkkuuden reaaliajassa. RTK-palvelu käsittää RTK- ja SSR-menetelmät. Lue lisää RTK-palvelusta ja sen toimintaperiaatteesta alempaa tältä sivulta
- Raakadatapalvelusta lähetetään tukiasemien muokkaamatonta havaintodataa reaaliaikastriimeinä Lue lisää Raakadatapalvelusta
Rekisteröidy käyttäjäksi
Saat FINPOS-palvelut käyttöösi rekisteröitymällä käyttäjäksi. Lisätietoja kustakin palvelusta alla sekä palvelukohtaisilla sivuilla.
- Avoimia ja maksuttomia palveluita ovat DGNSS- ja RINEX-palvelut
- RTK-palveluun voidaan myöntää määräaikainen käyttöoikeus tutkimus- & kehityskäyttöön.
- Raakadatapalvelu on maksullinen palvelu.
Paikannuspalvelun toimintaperiaate
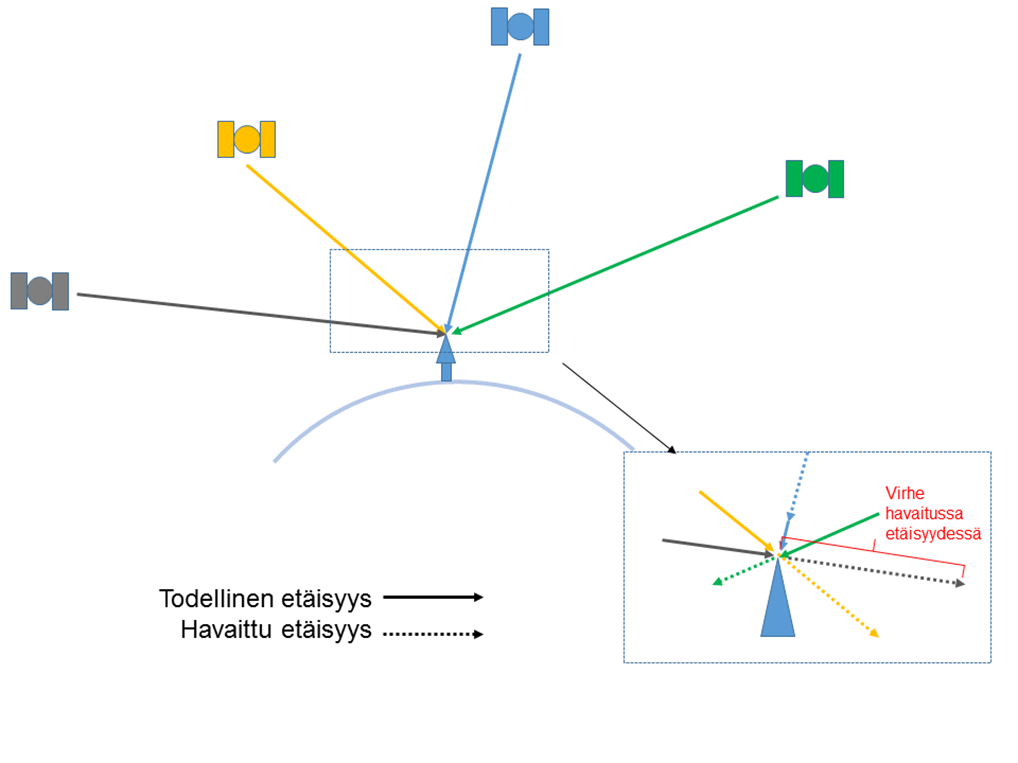
Satelliittipaikannus perustuu paikannussatelliittien ja käyttäjän vastaanottimen välisten etäisyyksien määrittämiseen. Kun etäisyys on määritetty useaan satelliittiin, voidaan käyttäjän sijainti laskea satelliittien tiedossa olevien sijaintien avulla.
Satelliitin ja käyttäjän vastaanottimen välisen etäisyyden määritykseen ja sen luotettavuuteen vaikuttavat kuitenkin useat virhelähteet. Paikannussatelliittien signaaleihin virhettä aiheuttavat mm. ionosfäärin ja troposfäärin vaikutus sekä satelliittien rata- ja kellovirheet. Virhelähteiden vaikutusta käyttäjän vastaanottimen sijainnissa voidaan pienentää, kun hyödynnetään kiinteän tarkasti koordinaateiltaan tunnetun havaintoaseman havaintoja. Tässä rajoitteena on kuitenkin etäisyys havaintoasemasta; mitä kauempana asemasta käyttäjä on, sitä epäluotettavampaa havaintoasemalta saatu tieto on käyttäjän sijainnissa. Kun käytetään useita havaintoasemia (esim. FinnRef-verkko) voidaan havaintoihin vaikuttavien virhelähteiden suuruudet mallintaa asemien välille paikannuspalveluohjelmistoilla. Näiden mallien perusteella luodaan käyttäjän sijaintiin korjaukset tai havainnot, jotka lähetetään internet- tai radioyhteyden yli käyttäjän vastaanottimelle. Sen jälkeen vastaanotin hyödyntää paikannuspalvelusta saatua dataa oman sijaintinsa ratkaisussa ja pääsee parempiin tuloksiin kuin ilman paikannuspalvelun käyttöä.
Katso alta video paikannuspalvelun toiminnasta yleisesti.
Menetelmät reaaliaikaiseen paikannukseen
DGNSS
DGNSS-paikannus (Differentiaalinen GNSS) perustuu tarkasti tunnettuihin referenssiasemien sijainteihin, joiden avulla voidaan määrittää, kuinka paljon aseman satelliitteihin tekemä etäisyyshavainnot poikkeavat todellisesta etäisyydestä (tunnettu aseman sijainti - tunnettu satelliitin sijainti). Näitä etäisyyseroja kutsutaan differentiaali/DGNSS-korjauksiksi, jotka lähetetään edelleen käyttäjälle. Käyttäjän vastaanotin korjaa ensin havaitsemiaan etäisyyksiä näiden differentiaalikorjausten verran ja laskee sitten sijaintinsa normaalisti. DGNSS-menetelmä käyttää paikannuksessa GNSS-signaaleihin moduloituja koodeja etäisyyden määritykseen satelliitteihin. Koodien avulla ei saavuteta samaa tarkkuutta kuin kantoaaltoa käyttämällä, jota RTK-paikannuksessa käytetään.
RTK
RTK-paikannuksessa (Reaaliaikainen kinemaattinen mittaus, Real Time Kinematic) sijainniltaan tarkasti tunnetulla tukiasemalla tehdyt kantoaallon vaihehavainnot lähetetään reaaliajassa käyttäjän vastaanottimelle, joka ratkaisee oman sijaintinsa suhteessa tukiasemaan käyttäen omia sekä tukiaseman havaintoja. Verkko-RTK -paikannus tarkoittaa taas sitä, että käyttäjälle lähetetään yhden aseman havaintojen sijaan käyttäjän paikkaan generoituja virtuaalihavaintoja, jotka perustuvat tukiasemaverkon tekemien havaintojen perusteella luotuun virhemallinnukseen. Erilaisia verkko-RTK -menetelmiä on esimerkiksi VRS, PRS, FKP, MAC ja MAX. Ne eroavat toisistaan siinä, miten prosessoitua dataa käyttäjälle lähetetään.
Verkko-RTK -paikannuksessa käyttäjän laitteen on lähetettävä palveluun sijaintinsa, jota käyttäen korjaukset yksilöidään käyttäjän sijaintiin.
SSR
SSR-menetelmässä (State Space Representation) käyttäjän laitteelle lähetetään korjaukset kuhunkin paikannukseen vaikuttavaan virhelähteeseen erikseen, kun verkko-RTK -menetelmässä virhelähteet summataan mallinnetuiksi havainnoiksi (OSR, Observation Space Representation). Käyttäjän laite hyödyntää sitten saamiaan korjausparametreja haluamallaan tavalla ja tuottaa niin sanotun PPP-ratkaisun (Precise Point Positioning), jossa sijaintia ei ratkaista tukiaseman suhteen kuten RTK:ssa. SSR/PPP-menetelmässä voidaan hyödyntää kantoaallon vaihetta. SSR-data sisältää korjaukset esimerkiksi satelliittien kello- ja ratavirheisiin, satelliittien biaksiin, sekä ionosfäärin ja troposfäärin aiheuttamiin virheisiin. Menetelmä tunnetaan myös PPP-RTK:na, eron PPP-korjauksiin tekee SSR-datan sisältämät alueelliset ionosfääri- ja troposfäärimallit.
SSR-korjauksia ei yksilöidä yksittäisen käyttäjän sijaintiin, vaan kaikki alueen käyttäjän saavat samat korjausparametrit. Alueellista vaihtelua SSR-korjausparametreissa on ainoastaan ionosfääri- ja trospofäärikorjauksissa, joissa niissäkin on mahdollista lähettää samat parametrit eri kokoisille alueille, esim. hyvinkin paikallisesti tai globaalisti. EU:n Galileo HAS-palvelu (High Accuracy Service) tulee tarjoamaan ilmaisia PPP-RTK-korjauksia Euroopan alueelle. HAS-palvelun Service Level 1 (sisältää globaalit kello-, rata-, ja biaskorjaukset) on julkaistu operatiiviseksi tammikuussa 2023, ks. lisätietoja EUSPA.
Lisätietoa SSR/PPP-RTK:sta esimerkiksi näistä lähteistä EUSPA, Geo++, GPS World, Institute of Navigation, Septentrio, ublox.