Laser scanning data 0,5 p
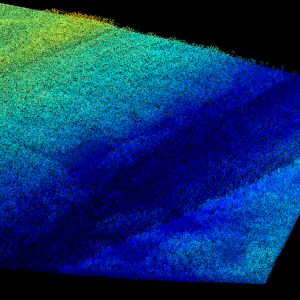
Laser scanning data refers to three-dimensional point-like data depicting the ground and objects on the ground. Each point is provided with x, y and z coordinate information.
Laser scanning data 0.5 p has been spaced out from Laser scanning data 5 p's density of 5 p/m² to a density of 0.5 p/m². Laser scanning data 0.5 p is open data, and from 2020 onwards, it will be collected according to the national laser scanning programme (in Finnish): https://www.maanmittauslaitos.fi/laserkeilaus-ja-ilmakuvaus. For the time being, it is available only from certain parts of Finland.
The product belongs to the open data of the National Land Survey of Finland. More information (in Finnish): https://www.maanmittauslaitos.fi/laserkeilausaineistot.
Purpose:
Laser scanning data is utilised i.a. for making topographic models. Topographic models are used in route optimisation and data collection applications and in applications studying water discharge and the forms of the ground surface. Laser scanning data is also utilised for creating contour lines.
Laser scanning data and three-dimensional models derived from it are applicable to be used in depicting the urban environment, e.g. in noise modelling. Laser scanning data is also utilised in land use planning and collecting information about forest resources and also in other analysis and monitoring of changes in the natural environment.
Geographic location
Entire Finland
Reference system
ETRS89 / TM35FIN(E,N) (EPSG:3067)
N2000 height (EPSG:3900)
Spatial representation
Vector
Data content
Data content: The input information of Laser scanning data 0.5 p is Laser scanning data 5 p, which has the following characteristics:
The point cloud has been quality checked and processed as well as possible to form the foundation for the nationwide elevation model and to be suitable for the needs of the nationwide forest classification. The classifications of point clouds have been implemented as automatic classifications. The classifications of air points or error points mentioned below have mainly been done automatically, and in practice they are never fully comprehensive. Other users of the data can filter and classify the data according to their own needs.
The point density (pulse density, i.e. outgoing laser pulses per square metre) is comprehensively at least 5 points/m², i.e. the distance between laser points on the ground is on average no more than approx. 0.40 m. The distribution of points (scanning image) is not necessarily completely even, but it depends on the type of scanner and the settings of each scanning flight.
Point classes:
Unclassified (class value 1 according to LAS 1.2 format, Unclassified). Before classification, all the laser points are in this class. After classification, this class includes all the points whose class has not changed in the classification process.
Overlap area (class value 12 according to LAS 1.2 format, Overlap). In case of overlapping trajectories, further classification only includes points from one trajectory. The rest of the points are included in this class. These points used for combining trajectories have been deleted from the data to lighten the data load, but they have been stored for possible exceptional needs.
Isolated, class value 16. Single points in the air and on the ground are classified in the Isolated class to decrease error points. A point is classified in this class, if there are 10 or fewer other points within a radius of 5 metres from the point. Some laser points from real features, such as points from power lines, or tree trunks in an open forest, are also included in this class.
Low error points (class value 7 according to LAS 1.2 format, Low Point). These points are according to the automatic classification statistically too low compared to the points in their surroundings. They can be due to e.g. scanner faults, multiple reflections of the laser pulse, or an incorrect separation of the return echo in the scanning system.
Ground (class value 2 according to LAS 1.2 format, Ground). These points represent the lowest surface that can be perceived from the air. The result depends on the values chosen for the parameters of the classification algorithm, and it is always a compromise between the number of points not belonging to the surface of the ground and points that the surface of the ground is lacking.
Air points, class value 15. Clouds, flying objects or other objects in the air are classified in this class.
Fault points, class value 17. Points due to scanner faults, remaining after automatic classifications are classified in this class.
Remaining unclassified (default class) laser points are classified according to elevation level in relation to the surface of the ground in three stages. The points include more than just vegetation points, even if the name of the class refers to vegetation.
Low vegetation (class value 3 according to LAS 1.2 format, Low Vegetation). Laser points from the height of 0.0–0.5 metres above ground level are classified in class 3.
Medium vegetation (class value 4 according to LAS 1.2 format, Medium Vegetation). Laser points from the height of 0.5–2.0 metres above ground level are classified in class 4.
High vegetation (class value 5 according to LAS 1.2 format, High Vegetation). Laser points from the height of 2.0–50.0 metres above ground level are classified in class 5.
The point density of Laser scanning data 0.5 p has been spaced out from the original density of 5 p/m² to 0.5 points/m², with the exception of limited areas pursuant to Section 14 of the Territorial Surveillance Act, where the spaced-out point density is 0.3 p/m². Due to the spacing out, the horizontal distribution of points is as even as possible. The average horizontal distance between points is approx. 1.4 m, in limited areas approx.1.8 m.
The point classes are otherwise the same as in the original Laser scanning data 5 p, but all fault point classes have been deleted before the spacing out.
The spacing out has been done with Terra Solid's TerraScan programme, so that points distributed as evenly as possible that correspond to the first return echoes and other return echoes related to the corresponding input pulses are chosen.
Laser scanning data 5 p has been processed into blocks of 1 x 1 km (1/9 of a UTM 5,000 map sheet). In Laser scanning data 0.5 p, these blocks have been combined in 3 x 3 km UTM 5,000 map sheets, and the borders of the small blocks can be perceived at some viewing levels of the point cloud.
Maintenance
Maintenance
The product is updated annually according to the national laser scanning programme: https://www.maanmittauslaitos.fi/laserkeilaus-ja-ilmakuvaus
The progress of the scanning and the availability of products can be seen on the status map: https://tilannekartta.maanmittauslaitos.fi/laserkeilaus
The product is available from the NLS MapSite's Download geospatial data -section according to the above-described updating rhythm.
Quality information
Lineage
Laser scanning data 0.5 p has been created by spacing out from the National Land Survey's most accurate elevation data set (Laser scanning data 5 p) without changing the quality properties of single laser points. Regarding unambiguous objects, the standard error of the elevation accuracy is at maximum 10 centimetres and the standard error in planimetric accuracy 45 centimetres.
Laser scanning data 0.5 p is produced after the production season, meaning that it is mainly available in the beginning of the year following the scanning period.
Distribution and further information
Responsible party
Maanmittauslaitos
Conditions applying to access and use
Mention the name of the Licensor (the National Land Survey of Finland), the name of the dataset(s) and the time when the National Land Survey has delivered the dataset(s) (e.g.: contains data from the National Land Survey of Finland Topographic Database 06/2014).
Distribution format
LAZ
Distribution channels
Further information
Laserkeilausaineistojen yksityiskohtaiset metatiedot toimitetaan pyydettäessä.
Pricing
Processing fees for laser scanning data 0,5 p
| Product | Price € (excl. VAT) | Price € (incl. VAT) |
|---|---|---|
|
77103010020
Laser scanning data 0.5 p, first map sheet
|
110,36 | 138,50 |
|
77103010021
Laser scanning data 0.5 p, following map sheets
|
18,96 | 23,80 |
|
77103010022
Laser scanning data 0.5 p, production area
|
283,67 | 356,00 |
|
77103010023
Laser scanning data 0.5 p, following production areas within the same order
|
110,36 | 138,50 |
|
77103010096
Laser scanning data 0,5 p all production areas of one year
|
1890,84 | 2 373,00 |
Not based on a decree