The 3D Modelling and Virtual Worlds group, as continuing the work of the previous Mobile Mapping research group develops and tests automatic algorithms for 3D object reconstruction from mobile laser scanning point clouds. Here are a few examples of ongoing research. More information on the groups research can be found at http://www.3dvr.fi.
Automatic object detection
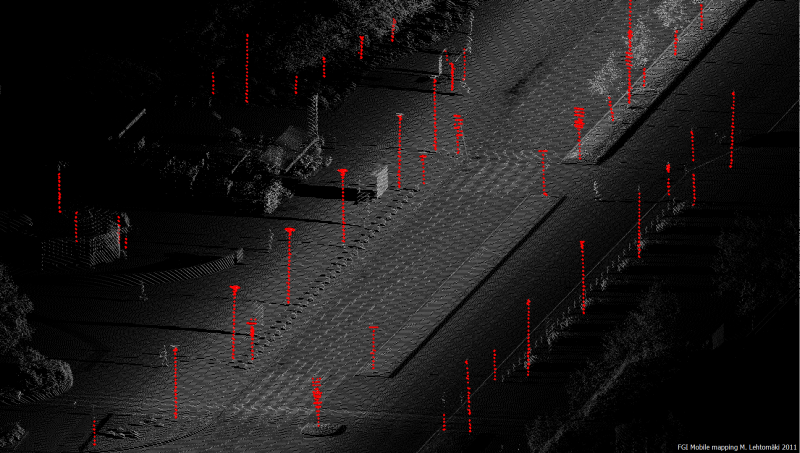
Object detection from mobile laser scanning (MLS)
The past few years have seen remarkable development in MLS to accommodate the need for large area and high-resolution 3D data acquisition. The flexible platforms of mobile laser scanning have made it possible to acquire data from complex terrains and scenes. The FGI ROAMER system is a mobile laser scanning system which consists of a FARO laser scanner, a GPS-INS navigation equipment, a camera system, synchronization electronics and a mechanical support structure. We have developed algorithms for pole detection and building wall detection.
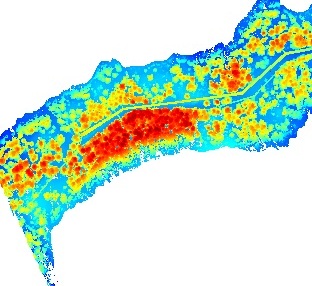
Object detection from Airborne Laser Scanning (ALS)
A laser scanner based on a platform of an aircraft, Airborne laser scanning (ALS) has been applied for surveying since 1994. After decades of development, the accuracy and density of point collection has been greatly improved. For instance, in 1993, the pulse repetition frequency (PRF) of ALS was 2 kHz, whereas in 2007, the best PRF of ALS was 200 kHz and in 2013, it had increased to 800 kHz. The point density has increased from a few points per m2 to the current usual density of 50 points/m2. We have developed methods for building roof detection and power line detection.

Photorealistic 3D model reconstruction
Advanced real-time visualization for location-based applications, such as vehicle navigation or mobile phone navigation, requires large scale 3D reconstruction of street scenes. The 3D reconstruction approaches for 3D terrain, 3D buildings, 3D road network and 3D trees have been developed. More details see http://www.3dvr.fi


Virtual worlds
Unity Game Engine and Oculus Rift can make you experience 3D immersive environment. In Unity 3D Game Engine, we have developed a weather system including sunny, rainy, snowy, windy and storm conditions, terrain splitting and populator tools with optimization capabilities. More developments can be found at http://www.3dvr.fi.

3D-city modelling for pedestrian navigation
Tapiola-center in Espoo was selected as a test case for 3D-city modelling for pedestrian navigation using mobile phones. Data for building reconstruction was collected with ROAMER, and the texture for the created 3D-model was acquired from terrestrial and airborne images. Several automatic algorithms were developed in the project, for example filtering of point clouds, building facade extraction and model compression.
